
Teaching Humanoids Without MoCap: Inside TWIST2’s Portable Data Collection System
Published:
Motivation
How do we collect humanlike motion data for robots without a $100K motion-capture studio?
TWIST2 is like a GoPro for humanoid learning i.e., small, cheap, portable and built to scale.
Why Humanoid Data Collection is Hard
- MoCap systems are accurate but expensive and bulky
- VR based systems were either limited to partial control or lacked natural motion.
- Humanoids need full body, long horizon coordination: walking, bending, grasping, looking simultaneously.
What TWIST2 Does Differently
- Portable Setup — A PICO 4U VR headset with two motion trackers replaces the MoCap suit.
- Robot Side — Unitree G1 humanoid with an attachable 2-DoF neck costing $250.
- Human Control — A single operator in VR becomes the robot. Moves arms, legs, and head naturally.
The Magic Pipeline (Explained Simply)
- Step 1 — Human moves in VR -> PICO streams motion at 100Hz
- Step 2 — Software retargets that motion to the robot’s body
- Step 3 — A learned motion tracking controller (trained via reinforcement learning) turns these into smooth, stable joint commands.
- Step 4 — Robot acts in real time (<0.1 s delay)
- Step 5 — The entire run - camera view, motion data, commands is saved as demonstration data.
What they actually achieved
Tell the story visually
- Folding towels with both hands
- Picking up baskets, opening doors, and walking through
- Performing dexterous pick-and-place and even kicking a box.
Quantify the efficiency:
- 100 successful demos in under 20 minutes
- Single operator, no calibration, no lab studio.
How Robots Learn from the data
Explain the next layer: the hierarchical policy
- Low level controller keeps balance and tracks motion
- High level Diffusion Policy predicts what motion comes next from the robot’s own visual input.
- Result: a robot that can autonomously repeat complex whole body tasks it learned from human teleoperation
Why it matters
This is where you connect to the broader AI world:
- Democratizes humanoid learning: <$2K setup instead of lab infrastructure.
- Enables open source, reproducible datasets for humanoid RL.
- Moves toward robots that can learn directly from natural human demonstrations.
Future & Limitations
Balance hype with realism:
- VR tracking isn’t as precise as MoCap
- High speed motions still hard to reproduce
- But the trade-off in portability, cost, and scalibility opens door for thousands for researchers.
“The next time you put on a VR headset remember you might not just be playing a game. You could be teaching the next generation of robots how to move, see and live among us.”
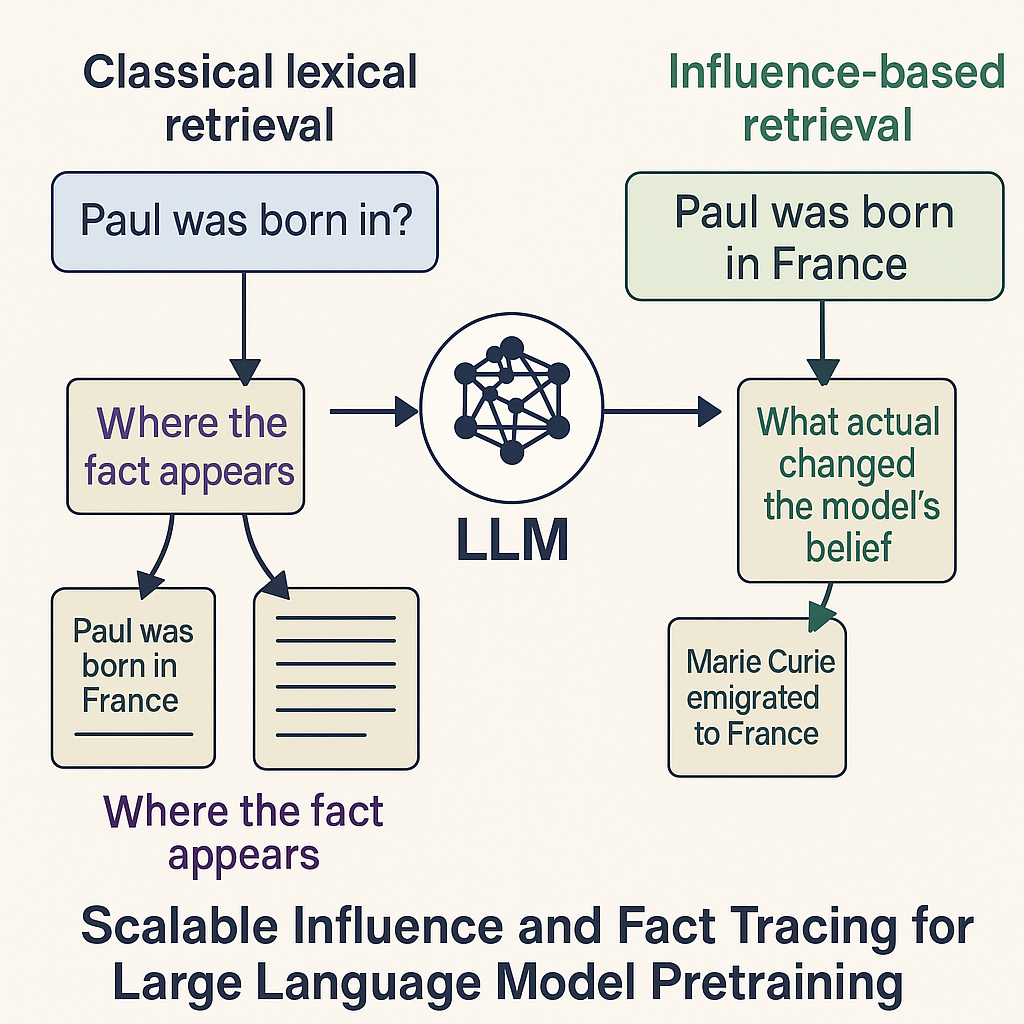 Figure: Difference between the classical lexical retrieval and the influence based retrieval for large language models
Figure: Difference between the classical lexical retrieval and the influence based retrieval for large language models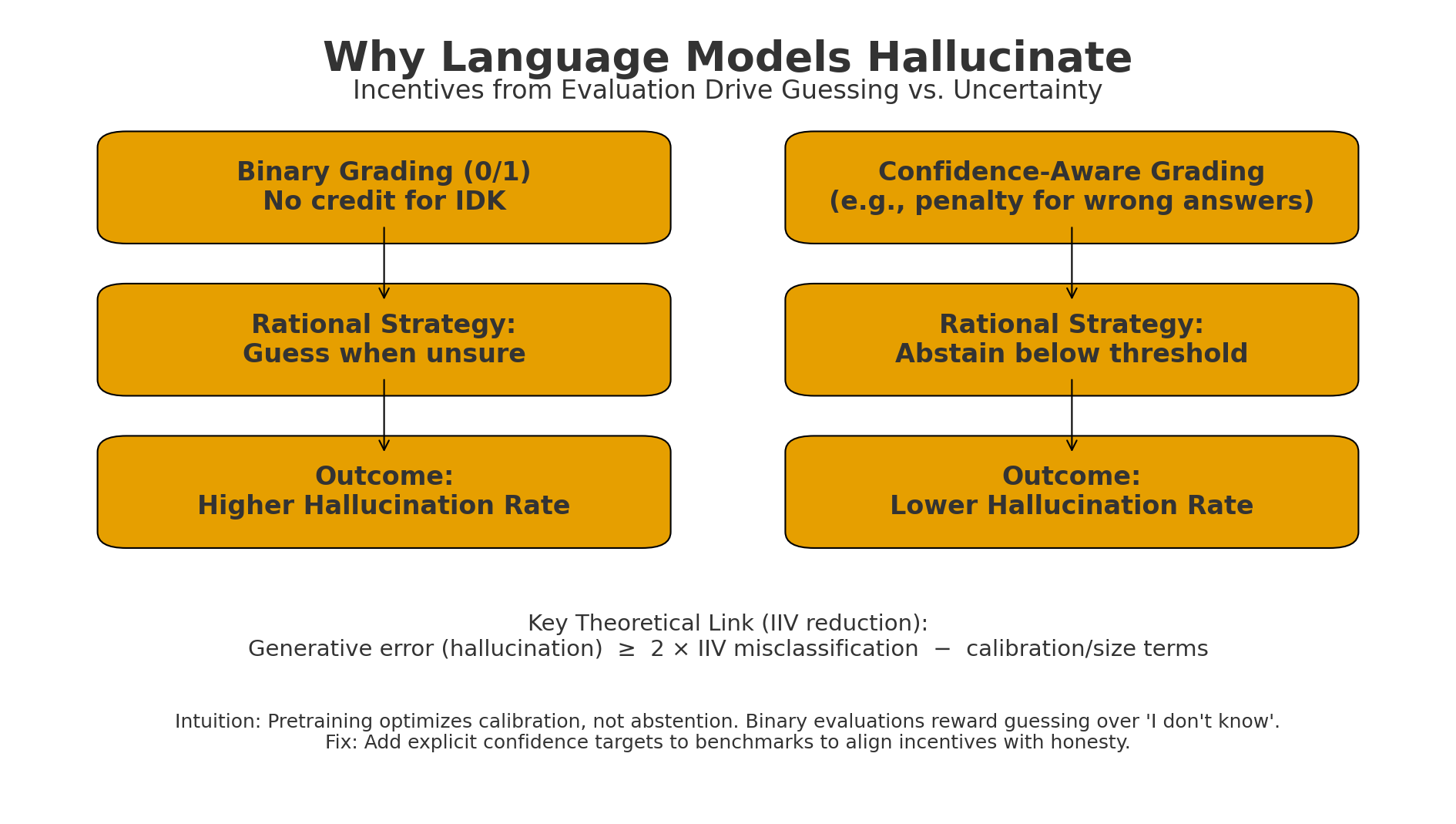 Figure: Binary grading makes “guess when unsure” optimal → higher hallucinations.
Figure: Binary grading makes “guess when unsure” optimal → higher hallucinations.